
bdm::Kalman< sq_T > Class Template Reference
Common abstract base for Kalman filters. More...
#include <kalman.h>
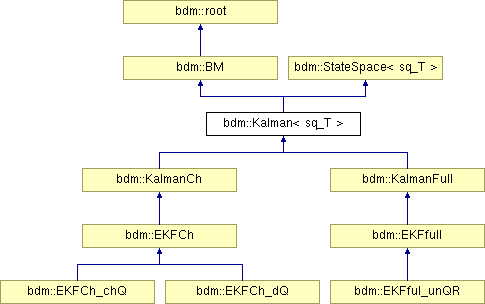
Inheritance diagram for bdm::Kalman< sq_T >:
Public Member Functions | |
| Kalman (const Kalman< sq_T > &K0) | |
| Copy constructor. | |
| void | set_statistics (const vec &mu0, const mat &P0) |
| set statistics of the posterior | |
| void | set_statistics (const vec &mu0, const sq_T &P0) |
| set statistics of the posterior | |
| const enorm< sq_T > & | posterior () const |
| return correctly typed posterior (covariant return) | |
| void | from_setting (const Setting &set) |
| void | to_setting (Setting &set) const |
| void | validate () |
| validate object | |
Protected Attributes | |
| RV | yrv |
| id of output | |
| mat | _K |
| Kalman gain. | |
| enorm< sq_T > | est |
| posterior | |
| enorm< sq_T > | fy |
| marginal on data f(y|y) | |
Detailed Description
template<class sq_T>
class bdm::Kalman< sq_T >
Common abstract base for Kalman filters.
Member Function Documentation
template<class sq_T>
| void bdm::Kalman< sq_T >::from_setting | ( | const Setting & | set | ) | [inline, virtual] |
Create object from the following structure
class = 'KalmanFull'; prior = configuration of bdm::epdf; % prior density represented by any offspring of epdf, bdm::epdf::from_setting - it will be converted to gaussian --- inherited fields --- bdm::StateSpace<sq_T>::from_setting bdm::BM::from_setting
Reimplemented from bdm::BM.
Reimplemented in bdm::KalmanCh, bdm::EKFfull, and bdm::EKFCh.
The documentation for this class was generated from the following file:
Generated on 2 Dec 2013 for mixpp by
 1.4.7
1.4.7