work/mixpp/pmsm/simulator_zdenek/ekf_example/ekf_obj.h File Reference
Bayesian Filtering for linear Gaussian models (Kalman Filter) and extensions. More...
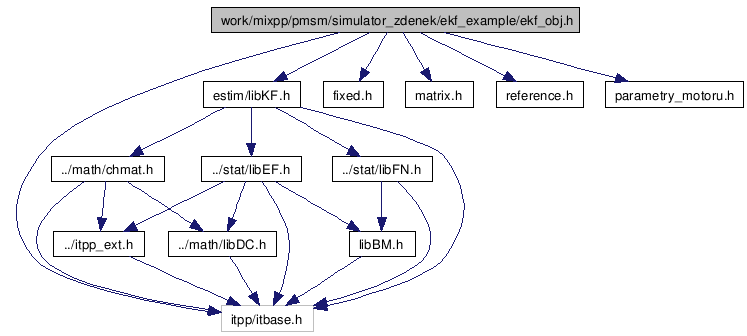
#include <itpp/itbase.h>
#include <estim/libKF.h>
#include "fixed.h"
#include "matrix.h"
#include "reference.h"
#include "parametry_motoru.h"
Include dependency graph for ekf_obj.h:
Go to the source code of this file.
Classes | |
| class | EKFfixed |
| Extended Kalman Filter in full matrices. More... | |
Functions | |
| double | minQ (double Q) |
Detailed Description
Bayesian Filtering for linear Gaussian models (Kalman Filter) and extensions.----------------------------------- BDM++ - C++ library for Bayesian Decision Making under Uncertainty
Using IT++ for numerical operations -----------------------------------