KalmanCh Class Reference
Kalman filter in square root form. More...
#include <libKF.h>
Inheritance diagram for KalmanCh:
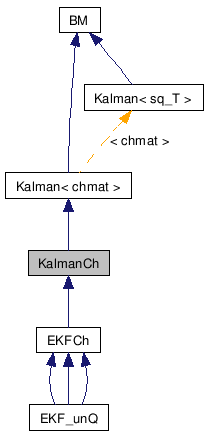
Collaboration diagram for KalmanCh:

Public Member Functions | |
| KalmanCh (RV rvx0, RV rvy0, RV rvu0) | |
| Default constructor. | |
| void | set_parameters (const mat &A0, const mat &B0, const mat &C0, const mat &D0, const chmat &R0, const chmat &Q0) |
| Set parameters with check of relevance. | |
| void | set_est (const vec &mu0, const chmat &P0) |
| Set estimate values, used e.g. in initialization. | |
| void | bayes (const vec &dt) |
| Here dt = [yt;ut] of appropriate dimensions. | |
| void | bayes (mat Dt) |
| Batch Bayes rule (columns of Dt are observations). | |
| epdf & | _epdf () |
| access function | |
| mat & | __K () |
| access function | |
| vec | _dP () |
| access function | |
| const RV & | _rv () const |
| access function | |
| double | _ll () const |
| access function | |
Protected Attributes | |
| mat | preA |
| pre array (triangular matrix) | |
| mat | postA |
| post array (triangular matrix) | |
| RV | rvy |
| Indetifier of output rv. | |
| RV | rvu |
| Indetifier of exogeneous rv. | |
| int | dimx |
| cache of rv.count() | |
| int | dimy |
| cache of rvy.count() | |
| int | dimu |
| cache of rvu.count() | |
| mat | A |
| Matrix A. | |
| mat | B |
| Matrix B. | |
| mat | C |
| Matrix C. | |
| mat | D |
| Matrix D. | |
| chmat | Q |
| Matrix Q in square-root form. | |
| chmat | R |
| Matrix R in square-root form. | |
| enorm< chmat > | est |
| posterior density on $x_t$ | |
| enorm< chmat > | fy |
| preditive density on $y_t$ | |
| mat | _K |
| placeholder for Kalman gain | |
| vec & | _yp |
| cache of fy.mu | |
| chmat & | _Ry |
| cache of fy.R | |
| vec & | _mu |
| cache of est.mu | |
| chmat & | _P |
| cache of est.R | |
| RV | rv |
| Random variable of the posterior. | |
| double | ll |
| Logarithm of marginalized data likelihood. | |
| bool | evalll |
If true, the filter will compute likelihood of the data record and store it in ll . Set to false if you want to save time. | |
Detailed Description
Kalman filter in square root form.Member Function Documentation
| void KalmanCh::bayes | ( | const vec & | dt | ) | [virtual] |
Here dt = [yt;ut] of appropriate dimensions.
The following equality hold::
![\[ \left[\begin{array}{cc} R^{0.5}\\ P_{t|t-1}^{0.5}C' & P_{t|t-1}^{0.5}CA'\\ & Q^{0.5}\end{array}\right]<\mathrm{orth.oper.}>=\left[\begin{array}{cc} R_{y}^{0.5} & KA'\\ & P_{t+1|t}^{0.5}\\ \\\end{array}\right]\]](form_17.png)
Thus this object evaluates only predictors! Not filtering densities.
Reimplemented from Kalman< chmat >.
Reimplemented in EKFCh.
References chmat::_Ch(), Kalman< chmat >::_K, Kalman< chmat >::_mu, Kalman< chmat >::_P, Kalman< chmat >::_Ry, Kalman< chmat >::_yp, Kalman< chmat >::A, Kalman< chmat >::B, Kalman< chmat >::C, Kalman< chmat >::D, Kalman< chmat >::dimu, Kalman< chmat >::dimx, Kalman< chmat >::dimy, BM::evalll, enorm< sq_T >::evalpdflog(), Kalman< chmat >::fy, BM::ll, postA, preA, and chmat::to_mat().
The documentation for this class was generated from the following files:
- work/git/mixpp/bdm/estim/libKF.h
- work/git/mixpp/bdm/estim/libKF.cpp