bdm::EKF< sq_T > Class Template Reference
Extended Kalman Filter. More...
#include <libKF.h>
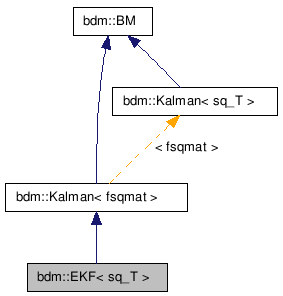
Inheritance diagram for bdm::EKF< sq_T >:
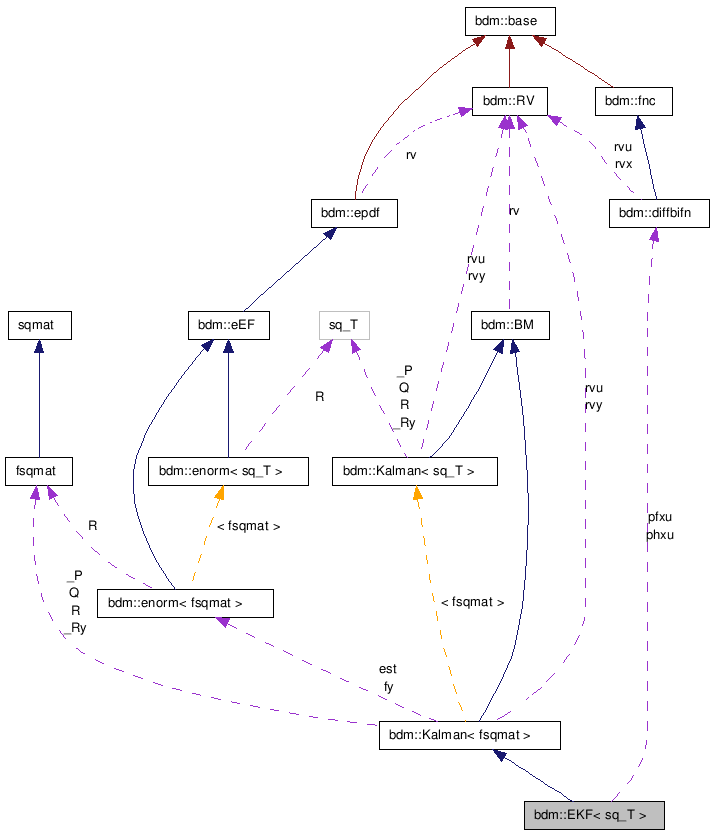
Collaboration diagram for bdm::EKF< sq_T >:
Public Member Functions | |
| EKF (RV rvx, RV rvy, RV rvu) | |
| Default constructor. | |
| void | set_parameters (diffbifn *pfxu, diffbifn *phxu, const sq_T Q0, const sq_T R0) |
| Set nonlinear functions for mean values and covariance matrices. | |
| void | bayes (const vec &dt) |
| Here dt = [yt;ut] of appropriate dimensions. | |
| void | set_parameters (const mat &A0, const mat &B0, const mat &C0, const mat &D0, const fsqmat &R0, const fsqmat &Q0) |
| Set parameters with check of relevance. | |
| void | set_est (const vec &mu0, const fsqmat &P0) |
| Set estimate values, used e.g. in initialization. | |
| const epdf & | _epdf () const |
| access function | |
| const enorm< fsqmat > * | _e () const |
| Returns a pointer to the epdf representing posterior density on parameters. Use with care! | |
| mat & | __K () |
| access function | |
| vec | _dP () |
| access function | |
| virtual void | bayesB (const mat &Dt) |
| Batch Bayes rule (columns of Dt are observations). | |
| virtual double | logpred (const vec &dt) const |
| vec | logpred_m (const mat &dt) const |
| Matrix version of logpred. | |
| virtual epdf * | predictor (const RV &rv) const |
| Constructs a predictive density (marginal density on data). | |
| const RV & | _rv () const |
| access function | |
| double | _ll () const |
| access function | |
| void | set_evalll (bool evl0) |
| access function | |
| virtual BM * | _copy_ (bool changerv=false) |
Protected Attributes | |
| RV | rvy |
| Indetifier of output rv. | |
| RV | rvu |
| Indetifier of exogeneous rv. | |
| int | dimx |
| cache of rv.count() | |
| int | dimy |
| cache of rvy.count() | |
| int | dimu |
| cache of rvu.count() | |
| mat | A |
| Matrix A. | |
| mat | B |
| Matrix B. | |
| mat | C |
| Matrix C. | |
| mat | D |
| Matrix D. | |
| fsqmat | Q |
| Matrix Q in square-root form. | |
| fsqmat | R |
| Matrix R in square-root form. | |
| enorm< fsqmat > | est |
| posterior density on $x_t$ | |
| enorm< fsqmat > | fy |
| preditive density on $y_t$ | |
| mat | _K |
| placeholder for Kalman gain | |
| vec & | _yp |
| cache of fy.mu | |
| fsqmat & | _Ry |
| cache of fy.R | |
| vec & | _mu |
| cache of est.mu | |
| fsqmat & | _P |
| cache of est.R | |
| RV | rv |
| Random variable of the posterior. | |
| double | ll |
| Logarithm of marginalized data likelihood. | |
| bool | evalll |
If true, the filter will compute likelihood of the data record and store it in ll . Set to false if you want to save computational time. | |
Detailed Description
template<class sq_T>
class bdm::EKF< sq_T >
Extended Kalman Filter.
An approximation of the exact Bayesian filter with Gaussian noices and non-linear evolutions of their mean.
Member Function Documentation
| virtual double bdm::BM::logpred | ( | const vec & | dt | ) | const [inline, virtual, inherited] |
Evaluates predictive log-likelihood of the given data record I.e. marginal likelihood of the data with the posterior integrated out.
Reimplemented in bdm::ARX, bdm::MixEF, and bdm::multiBM.
Referenced by bdm::BM::logpred_m().
| virtual BM* bdm::BM::_copy_ | ( | bool | changerv = false |
) | [inline, virtual, inherited] |
The documentation for this class was generated from the following file:
- work/git/mixpp/bdm/estim/libKF.h