
#include <libPF.h>
Public Member Functions | |
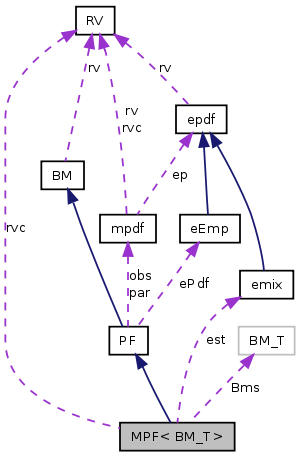
| MPF (const RV &rv0, mpdf &par0, mpdf &obs0, int n, const BM_T &BMcond0) | |
| Default constructor. | |
| void | bayes (const vec &dt) |
| Incremental Bayes rule. | |
| epdf & | _epdf () |
| Returns a pointer to the epdf representing posterior density on parameters. Use with care! | |
| void | set_est (const epdf *&epdf0) |
| void | bayes (mat Dt) |
| Batch Bayes rule (columns of Dt are observations). | |
Protected Attributes | |
| int | n |
| number of particles; | |
| eEmp | ePdf |
| posterior density | |
| vec & | w |
pointer into eEmp | |
| Array< vec > & | samples |
pointer into eEmp | |
| mpdf & | par |
| Parameter evolution model. | |
| mpdf & | obs |
| Observation model. | |
| RV | rv |
| Random variable of the posterior. | |
| double | ll |
| Logarithm of marginalized data likelihood. | |
| bool | evalll |
If true, the filter will compute likelihood of the data record and store it in ll . Set to false if you want to save time. | |
| void MPF< BM_T >::bayes | ( | const vec & | dt | ) | [inline, virtual] |
 1.5.3
1.5.3