BDM Use - Estimation and Bayes Rule
Baysian theory is predominantly used in system identification, or estimation problems. This section is concerned with recursive estimation, as implemneted in prepared scenario estimator.
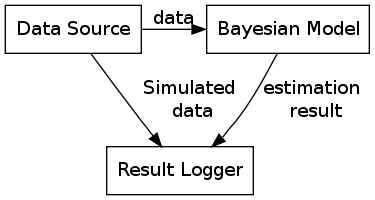
The function of the estimator is graphically illustrated:
Here,
- Data Source is an object (class DS) providing sequential data,
![$ [d_1, d_2, \ldots d_t] $](form_173.png) .
. - Bayesian Model is an object (class BM) performing Bayesian filtering,
- Result Logger is an object (class logger) dedicated to storing important data from the experiment.
Since objects datasource and the logger has already been introduced in section BDM Use - System, Data, Simulation, it remains to introduce object Bayesian Model (bdm::BM).
Bayes rule and estimation
The object bdm::BM is basic software image of the Bayes rule:
![\[ f(x_t|d_1\ldots d_t) \propto f(d_t|x_t,d_1\ldots d_{t-1}) f(x_t| d_1\ldots d_{t-1}) \]](form_174.png)
Since this operation can not be defined universally, the object is defined as abstract class with methods for:
- Bayes rule as defined above, operation bdm::BM::bayes() which expects to get the current data record
dt,
- log-likelihood i.e. numerical value of
 as a typical side-product, since it is required in denominator of the above formula. For some models, computation of this value may require extra effort, hence it computation can be suppressed by setting BM::set_evalll(false).
as a typical side-product, since it is required in denominator of the above formula. For some models, computation of this value may require extra effort, hence it computation can be suppressed by setting BM::set_evalll(false). - prediction the object has enough information to create the one-step ahead predictor, i.e.
this object can be either created bdm::BM::predictor(), sometimes it is enought only a few values of prediction hence construction of the full predictor would be too expensive operation. For this situation were designed cheaper operations bdm::BM::logpred() or bdm::BM::epredictor(). These are only basic operations, see full documentation for full range of defined operations.![\[ f(d_{t+1}| d_1 \ldots d_{t}), \]](form_180.png)
These operation are abstract, i.e. not implemented for the general class. Implementation of these operations is heavily dependent on the specific class of prior pdf, or its approximations. We can identify only a few principal approaches to this problem. For example, analytical estimation which is possible within sufficient the Exponential Family, or estimation when both prior and posterior are approximated by empirical densities. These approaches are first level of descendants of class BM, classes bdm::BMEF and bdm::PF, repectively.
Variants of these approaches are implemented as descendats of these level-two classes. This way, each estimation method (represented a class) is fitted in its place in the tree of approximations. This is useful even from software point of view, since related approximations have common methods and data fields.
Estimation of ARX models
Autoregressive models has already been introduced in Simulating autoregressive model where their simulator has been presented. We will use results of simulation of the ARX datasource defined there to provide data for estimation using MemDS.
The following code is from bdmtoolbox/tutorial/userguide/arx_basic_example.m
A1.class = 'ARX'; A1.rv = y; A1.rgr = RVtimes([y,y],[-3,-1]) ; A1.options = 'logbounds,logll';
This is the minimal configuration of an ARX estimator. Optional elements of bdm::ARX::from_setting() were set using their default values:
The first three fileds are self explanatory, they identify which data are predicted (field rv) and which are in regressor (field rgr). The field options is a string of options passed to the object. In particular, class BM understand only options related to storing results:
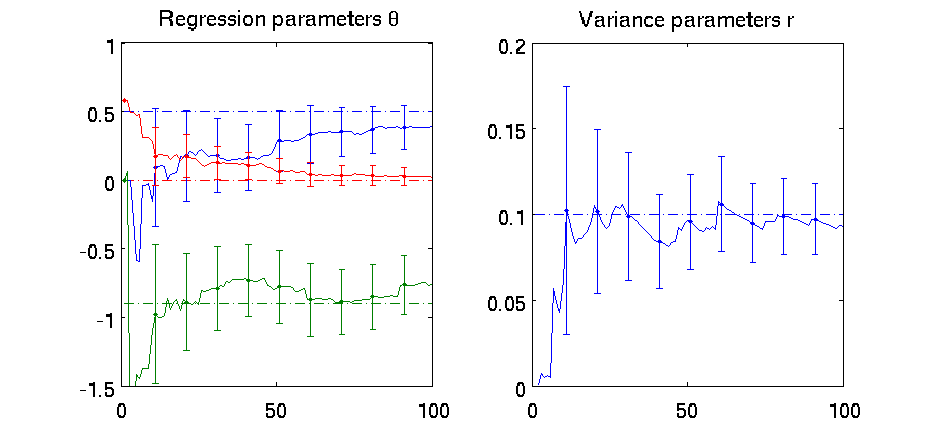
- logbounds - store also lower and upper bounds on estimates (obtained by calling BM::posterior().qbounds()),
- logll - store also loglikelihood of each step of the Bayes rule. These values are stored in given logger (ug_loggers). By default, only mean values of the estimate are stored.
Storing of the log-likelihood is useful, e.g. in model selection task when too models are compared.
The bounds are useful e.g. for visualization of the results. Run of the example should provide result like the following:
Model selection
In Bayesian framework, model selection is done via comparison of marginal likelihood of the recorded data. See [some theory].
A trivial exammple how this can be done is presented in file bdmtoolbox/tutorial/userguide/arx_selection_example.m. The code extends the basic A1 object as follows:
A2=A1; A2.constant = 0; A3=A2; A3.frg = 0.95;
That is, two other ARX estimators are created,
- A2 which is the same as A1 except it does not model constant term in the linear regression. Note that if the constant was set to zero, then this is the correct model.
- A3 which is the same as A2, but assumes time-variant parameters with forgetting factor 0.95.
Since all estimator were configured to store values of marginal log-likelihood, we can easily compare them by computint total log-likelihood for each of them and converting them to probabilities. Typically, the results should look like:
Model_probabilities =
0.0002 0.7318 0.2680
Hence, the true model A2 was correctly identified as the most likely to produce this data.
For this task, additional technical adjustments were needed:
A1.name='A1'; A2.name='A2'; A2.rv_param = RV({'a2th', 'r'},[2,1],[0,0]); A3.name='A3'; A3.rv_param = RV({'a3th', 'r'},[2,1],[0,0]);
First, in order to distinguish the estimators from each other, the estimators were given names. Hence, the results will be logged with prefix given by the name, such as M.A1ll for field ll.
Second, if the parameters of a ARX model are not specified, they are automatically named theta and r. Howver, in this case, A1 and A2 differ in size, hence their random variables differ and can not use the same name. Therefore, we have explicitly used another names (RVs) of the parameters.
Composition of estimators
Similarly to mpdfs which could be composed via mprod, the Bayesian models can be composed. However, justification of this step is less clear than in the case of epdfs.
One possible theoretical base of composition is the Marginalized particle filter, which splits the prior and the posterior in two parts:
![\[ f(x_t|d_1\ldots d_t)=f(x_{1,t}|x_{2,t},d_1\ldots d_t)f(x_{2,t}|d_1\ldots d_t) \]](form_181.png)
each of these parts is estimated using different approach. The first part is assumed to be analytically tractable, while the second is approximated using empirical approximation.
The whole algorithm runs by parallel evaluation of many BMs for estimation of  , each of them conditioned on value of a sample of
, each of them conditioned on value of a sample of  .
.
For example, the forgetting factor,  of an ARX model can be considered to be unknown. Then, the whole parameter space is
of an ARX model can be considered to be unknown. Then, the whole parameter space is ![$ [\theta_t, r_t, \phi_t]$](form_184.png) decomposed as follows:
decomposed as follows:
![\[ f(\theta_t, r_t, \phi_t) = f(\theta_t, r_t| \phi_t) f(\phi_t) \]](form_185.png)
Note that for known trajectory of  the standard ARX estimator can be used if we find a way how to feed the changing into it. This is achieved by a trivial extension using inheritance method bdm::BM::condition().
the standard ARX estimator can be used if we find a way how to feed the changing into it. This is achieved by a trivial extension using inheritance method bdm::BM::condition().