#include <libBM.h>
Public Member Functions | |
| virtual void | bayes (const vec &dt, bool evall=true)=0 |
| Incremental Bayes rule. | |
| void | bayes (mat Dt) |
| Batch Bayes rule (columns of Dt are observations). | |
Public Attributes | |
| double | ll |
| Logarithm of marginalized data likelihood. | |
| virtual void BM::bayes | ( | const vec & | dt, | |
| bool | evall = true | |||
| ) | [pure virtual] |
Incremental Bayes rule.
| dt | vector of input data | |
| evall | If true, the filter will compute likelihood of the data record and store it in ll |
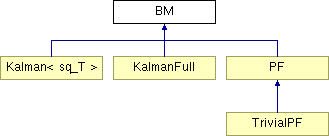
Implemented in KalmanFull, Kalman< sq_T >, and TrivialPF.
 1.5.3
1.5.3