PF Class Reference
Trivial particle filter with proposal density equal to parameter evolution model. More...
#include <libPF.h>
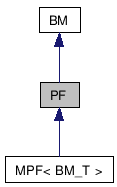
Inheritance diagram for PF:
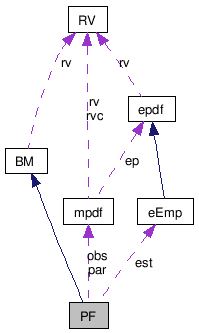
Collaboration diagram for PF:
Public Member Functions | |
| PF (const RV &rv0, mpdf &par0, mpdf &obs0, int n0) | |
| Default constructor. | |
| void | set_est (const epdf &epdf0) |
| Set posterior density by sampling from epdf0. | |
| void | bayes (const vec &dt) |
| Incremental Bayes rule. | |
| void | bayes (mat Dt) |
| Batch Bayes rule (columns of Dt are observations). | |
| virtual epdf & | _epdf ()=0 |
| Returns a pointer to the epdf representing posterior density on parameters. Use with care! | |
| const RV & | _rv () const |
| access function | |
| double | _ll () const |
| access function | |
Protected Attributes | |
| int | n |
| number of particles; | |
| eEmp | est |
| posterior density | |
| vec & | _w |
pointer into eEmp | |
| Array< vec > & | _samples |
pointer into eEmp | |
| mpdf & | par |
| Parameter evolution model. | |
| mpdf & | obs |
| Observation model. | |
| RV | rv |
| Random variable of the posterior. | |
| double | ll |
| Logarithm of marginalized data likelihood. | |
| bool | evalll |
If true, the filter will compute likelihood of the data record and store it in ll . Set to false if you want to save time. | |
Detailed Description
Trivial particle filter with proposal density equal to parameter evolution model.
Posterior density is represented by a weighted empirical density (eEmp ).
Member Function Documentation
| void PF::bayes | ( | const vec & | dt | ) | [virtual] |
Incremental Bayes rule.
- Parameters:
-
dt vector of input data
Implements BM.
Reimplemented in MPF< BM_T >.
References _samples, _w, est, mpdf::evalcond(), n, obs, par, eEmp::resample(), and mpdf::samplecond().
The documentation for this class was generated from the following files:
- work/mixpp/bdm/estim/libPF.h
- work/mixpp/bdm/estim/libPF.cpp